လေှျာက်လွှာ
Cy-jp20kn microcomputomputer Spress Absorber Sky Spuge Spuge Testing Test သည်အဓိကအားဖြင့်ပင်ပန်းနွမ်းနယ်မှု, ဘီးနှစ်ဘီးမော်တော်ယာဉ်များ, မော်တော်ယာဉ်များနှင့်အခြားမော်တော်ယာဉ်များနှင့်အခြားမော်တော်ယာဉ်များနှင့်အခြားမော်တော်ယာဉ်များတွင်သုံးသောစက်ဘီးများ, အထူးစံနမူနာများ၏ပင်ပန်းနမူနာများနှင့်ကိုက်ညီရန်အထူးကရိယာများကိုလည်းပြုလုပ်နိုင်သည်။
Microccomputor မှထိန်းချုပ်ထားသော Absorber နွေ ဦး ပင်ပန်းနွမ်းနယ်မှုစစ်ဆေးစက်သည်အဆင့်မြင့်သာမန်ပင်ပန်းနွမ်းနယ်မှု, နည်းပညာနည်းလမ်းများ။
အသေးစိတ်အချက်အလက်
| နံမယ် | အသေးစိတ်အချက်အလက် | ||
| 1 | အများဆုံးစမ်းသပ်အင်အားစု | 20kn | |
| 2 | စမ်းသပ်မှုဘူတာအရေအတွက် | 1 | |
| 3 | စမ်းသပ်မှုကြိမ်နှုန်း | 0.5 ~ 5hz | |
| 4 | ကြိမ်နှုန်းတိကျမှန်ကန်မှုကို | 0.1 hz | |
| 5 | စမ်းသပ်လွှဲခွင် | ± 50mm | |
| 7 | ကောင်တာအများဆုံးစွမ်းရည် | 1 ဘီလီယံအကြိမ် | |
| 8 | ရပ်တန့်တိကျမှန်ကန်မှုကိုရေတွက်ခြင်း | ± 1 | |
| 9 | စမ်းသပ်အပိုင်းအစအများဆုံးအချင်းအချင်း | φ90mm | |
| 12 | Power Supply Voltage (Wire လေးအဆင့်စနစ်) | 380vac 50Hz | |
| 13 | အဓိကမော်တာပါဝါ | 7.5kw | |
| 14 | အရွယ် | host ည့်သည် | 1200 * 800 * 2100 (ဇ) |
| ထိန်းချုပ်မှု box ကို | 700 * 650 * 1450 | ||
| 15 | အလေးချိန် | 450 ကီလိုဂရမ် | |
အဓိကအင်္ဂါရပ်များ
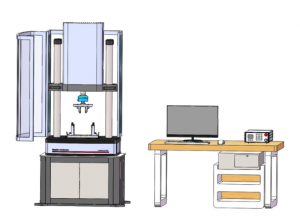
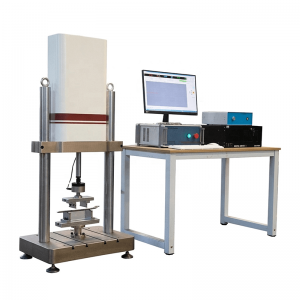
1.1 host:အိမ်ရှင်ကိုအဓိကအားဖြင့်ဘောင်, စက်ပစ္စည်းတင်ဆောင်ယန္တရား, ဂီယာယန္တရားနှင့်ကရိယာတစ်ခုဖြင့်ဖွဲ့စည်းထားသည်။ အဆိုပါ frame ကိုကော်လံတစ်ခုကော်လံ, စိတ်လှုပ်ရှားစရာပလက်ဖောင်း, အလွန်စိတ်လှုပ်ရှားစရာပလက်ဖောင်း, တစ် ဦး အပေါ်ရောင်ခြည်, အမြင့်ရောင်ခြည်, ကော်လံ, workbench, စိတ်လှုပ်ရှားစရာပလက်ဖောင်း, အထက်ရောင်ခြည်တစ်ခု, အထက်ရောင်ခြည်တစ်ခု, စမ်းသပ်ပြီးသော Shock စုပ်ယူသူကိုစိတ်လှုပ်ရှားစရာစားပွဲနှင့်လက်လှမ်းမီသည့်ဝက်အူများအကြားတပ်ဆင်ထားသည်။ ခဲတံဝက်အူ၏ရုပ်သိမ်းခြင်းကိုညှိခြင်းဖြင့်မတူညီသောအရွယ်အစားအမျိုးမျိုးကိုရှာဖွေနိုင်ပြီးကွဲပြားခြားနားသောတပ်ဆင်မှုနည်းလမ်းများကိုပြောင်းလဲခြင်းဖြင့်တွေ့ဆုံနိုင်သည် ကရိယာ။ လိုအပ်ချက်များ
1.2 loading ယန္တရား:၎င်းသည်စက်ပိုင်းဆိုင်ရာဖွဲ့စည်းပုံဖြစ်ပြီးအဓိကအားဖြင့်မော်တာ၏လှည့်ပတ်ရွေ့လျားမှုကိုဒေါင်လိုက် linear သို့ကူးပြောင်းသည့်အနေဖြင့်ချိတ်ဆက်ထားသောလှံတံယန္တရားတစ်ခုဖြင့်ဖွဲ့စည်းထားသည့် crank crink rod rod letter ၏ရေးစပ်ခြင်းဖြင့်ဖွဲ့စည်းထားသည်။ Slider ၏မွေ့လျော်မှုကိုညှိခြင်းအားဖြင့် linear အပြန်အလှန်အားဖြင့်အပြန်အလှန်ဆက်သွယ်မှုအကွာအဝေးကိုစမ်းသပ်ခြင်းဖြင့်လိုအပ်သောစမ်းသပ်မှုကိုချိန်ညှိနိုင်သည်။
1.3 ထုတ်လွှင့်ခြင်းစနစ်:ဂီယာယန္တရားကိုအဆင့်သုံး allynchronous motor နှင့် flywheel ဖြင့်ဖွဲ့စည်းထားသည်။ TREESTION Converter ကမော်တာ၏အမြန်နှုန်းကိုကြိမ်နှုန်းဖြင့်ချိန်ညှိနိုင်သည်။
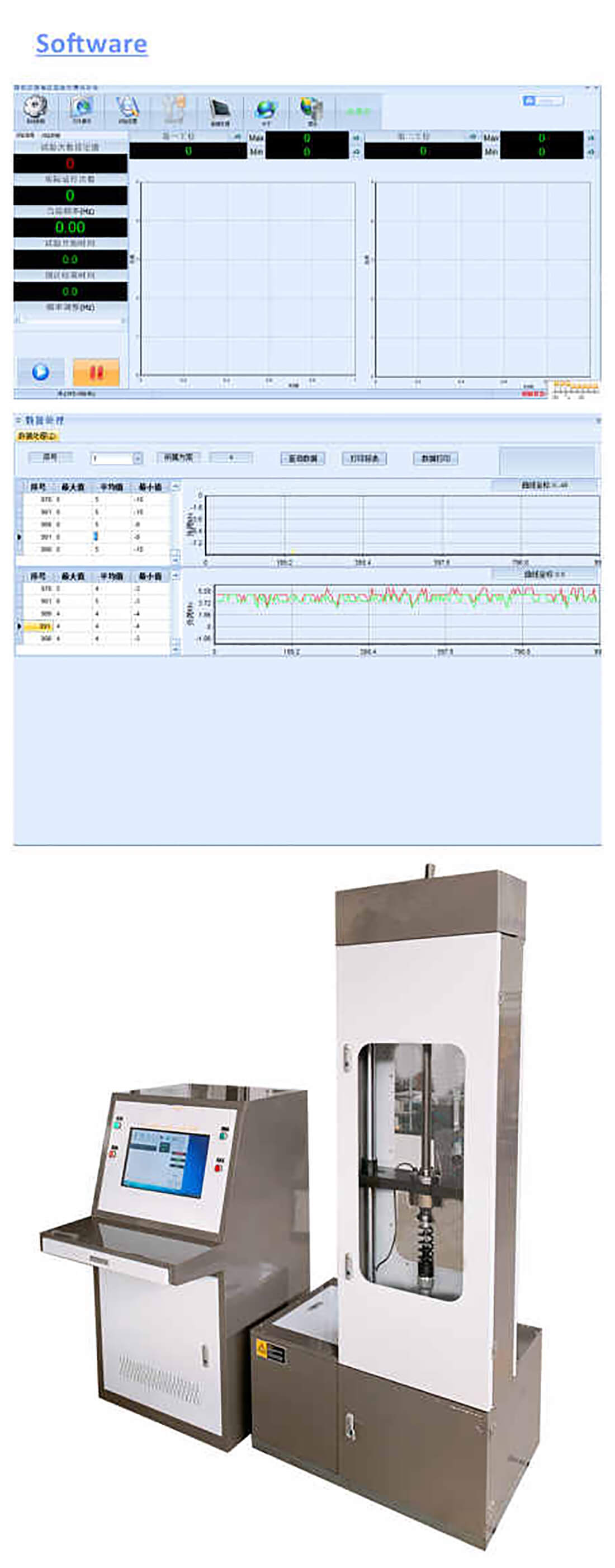
1.4 ထိန်းချုပ်မှုစနစ်:ကွန်ပျူတာတိုင်းတာခြင်းနှင့်ထိန်းချုပ်မှုစနစ်ကိုကျွန်ုပ်တို့၏ကုမ္ပဏီမှလွတ်လပ်စွာတီထွင်ထုတ်လုပ်နိုင်ပြီးထုတ်လုပ်သည်။ ၎င်းတွင်မှတ်ဉာဏ် function တစ်ခုရှိပြီး၎င်းသည်မည်သည့်အချိန်တွင်မဆိုသမိုင်းဆိုင်ရာစစ်ဆေးမှုအချက်အလက်များကိုအသုံးပြုနိုင်သည်။ တိုင်းတာခြင်းနှင့်ထိန်းချုပ်မှုစနစ်သည်စမ်းသပ်ကိရိယာ၏ဗဟိုဖြစ်သည်။ တစ်ချိန်တည်းတွင်ကွန်ပျူတာသည်စစ်ဆေးမှုအတွင်းတွင် Shock Absorber တစ်ခုချင်းစီ၏စမ်းသပ်မှုအင်အားသုံးအချက်ပြမှုကိုစစ်ဆေးပြီး Test Force ကိုအချိန်မှန်ဖြင့်ပြသပြီး status parameters များကိုပြသသည် - စမ်းသပ်မှုကြိမ်နှုန်း, , အခြားတစ်ဖက်တွင်မူ, စစ်အင်အား attenuation စသည်ဖြင့်ထိန်းချုပ်မှုဆိုင်ရာအချက်များအရထိန်းချုပ်မှုဆိုင်ရာသတ်မှတ်ချက်များကိုထိန်းချုပ်ရန်လိုအပ်ချက်များနှင့်အများသည်အလိုအလျောက်ပိတ်ပစ်စစ်ဆေးမှုနံပါတ်များအရအလိုအလျှောက်ပိတ်သိမ်းခြင်း, ထိန်းချုပ်မှု signal ကိုထုတ်လွှင့်ပြီးအားကြီးသောလက်ရှိ Controller သည်အဓိကမော်တာကိုထိန်းချုပ်သည်။ စာမေးပွဲတွင်ပြုပြင်ပြောင်းလဲမှုနေရာများကိုပြုပြင်ပြောင်းလဲခြင်း, ပုံတွင်ပြထားတဲ့အတိုင်းလုံခြုံရေး -
1.5 software function နိဒါန်းနိဒါန်း
1.5.1 စမ်းသပ်မှုအရေအတွက်ကိုသတ်မှတ်နိုင်သည်။ အများဆုံးပမာဏသည်အကြိမ် 1 ဘီလီယံဖြစ်သည်။
1.5.2 စမ်းသပ်မှုအရေအတွက်သည်သတ်မှတ်ထားသည့်နံပါတ်ကိုရောက်ရှိပြီးစမ်းသပ်မှုစက်ကိုစစ်ဆေးရန်စစ်ဆေးသည်။
1.5.3 စမ်းသပ်မှုဆော့ဗ်ဝဲစနစ်သည်စမ်းသပ်မှုအကြိမ်ရေနှင့်ကွန်ပျူတာမှတဆင့်စမ်းသပ်မှုအရေအတွက်ကိုပြ သ. ,
1.5.4 Shock Absorber သည်မည်သည့်ဘူတာရုံတွင်မဆိုထိတ်လန့်တုန်လှုပ်စေသောအနေဖြင့်မည်သည့်ဘူတာရုံတွင်မဆိုပျက်စီးဆုံးရှုံးမှုသည်မည်သည့်ဘူတာရုံတွင်မဆိုပျက်စီးသွားသည့်အခါအလိုအလျောက်ပိတ်ခြင်း၏လုပ်ဆောင်မှုသည်အလိုအလျောက်ပိတ်ခြင်း၏လုပ်ဆောင်မှုဖြစ်သည်။
1.5.5 ဒါဟာတကယ့်ကိုထိတ်လန့်တုန်လှုပ်စေသောစုပ်ယူချက်တစ်ခု၏စမ်းသပ်မှု force-time curve ၏ test display function ရှိပြီး Test Plan ၏နမူနာကာလအရ Show Abeber ၏ဝန် attenuation အချက်အလက်များကိုမှတ်တမ်းတင်ထားသည်။
1.6 အဓိကအင်္ဂါရပ်များမှာအောက်ပါအတိုင်းဖြစ်သည် -
1.6.1 လွှဲခွင်နှင့်ကြိမ်နှုန်းကိုလွတ်လပ်စွာချိန်ညှိနိုင်သည်။
1.6.2 တုန်ခါမှုအချိန်နှင့်ကြိမ်နှုန်း၏ဒီဂျစ်တယ်ပြသမှု။
1.6.3 ကြိုတင်သတ်မှတ်ထားသည့်အချိန်ကိုအလိုအလျောက်ပိတ်ခြင်း, ပိုမိုမြင့်မားခြင်း။
1.6.4 ထိတ်လန့်တုန်လှုပ်စေသောစုပ်ယူသူတစ် ဦး တည်း၏စမ်းသပ်မှုကိုပြုလုပ်နိုင်သည်။
1.6.6 ကြိုတင်ပြင်ဆင်ထားသည့်အပိတ်အရေအတွက်ကိုပိုင်ရှင်မဲ့စစ်ဆေးမှုများအတွက်အသုံးပြုနိုင်သည်။
1.6.7 စမ်းသပ် fixture installation screw တွင်းရှိပါတယ်;
1လွှဲခွင်ညှိနှိုင်းမှုအတွက်အဆင်ပြေသောလွှဲခွင်ချိန်ညှိကိရိယာများတပ်ဆင်ထားသည့် .6.8 .6.8 ။