လျှောက်လွှာလယ်ပြင်
Electro-hydraulic sermo dynamic dynamic fulmate စမ်းသပ်မှုစက် (စမ်းသပ်စက်အဖြစ်ရည်ညွှန်းသည်) သည်အခန်းအပူချိန် (သို့မဟုတ်အပူချိန်မြင့်မားခြင်း, အပူချိန်မြင့်မားခြင်း, စမ်းသပ်စက်သည်အောက်ပါစစ်ဆေးမှုများကိုလုပ်ဆောင်နိုင်သည်။
ဆိန်နှင့် compression စမ်းသပ်မှု
ကြီးထွားမှုစမ်းသပ်မှုအက်ကွဲ
လျှပ်စစ်ထိန်းချုပ်သူ, Servo Valve, load sensaccement sensoromer နှင့် computer ကိုအလိုအလျောက်တိကျစွာထိန်းချုပ်နိုင်ပြီးစမ်းသပ်ခြင်း, နေရာချထားခြင်း, နေရာရွှေ့ပြောင်းခြင်း, ထောင့်။
စမ်းသပ်စက်သည် Sine Wave, Triangle Wave, Square Wave, Sawtooth Wave, Sawtooth Wave, Tulse Wave နှင့် Tulse Wave နှင့် Tulte Wave နှင့် Hulse Wave Tests နှင့် Cycle Wave Tests နှင့် Cycle Wave Tests နှင့် Hulse Wave Tests နှင့် Tulse Wave Tests နှင့် Hulse Wave Tests နှင့် Hulse Wave Tests နှင့် Hulse Wave Tests နှင့် Tulse Wave Tests နှင့် Hulse Wave Tests နှင့် Hulse Wave Tests နှင့် Hulse Wave Tests နှင့် Hulse Wave Tests, ၎င်းတွင်ကွဲပြားခြားနားသောအပူချိန်တွင်ပတ် 0 န်းကျင်ဆိုင်ရာ simulation tests များကိုဖြည့်ဆည်းရန်ပတ်ဝန်းကျင်ဆိုင်ရာစမ်းသပ်ကိရိယာတစ်ခုကိုလည်းတပ်ဆင်ထားသည်။
စမ်းသပ်စက်သည်ပြောင်းလွယ်ပြင်လွယ်ရှိပြီးအလုပ်လုပ်ရန်အဆင်ပြေသည်။ ရွေ့လျားနေသောရောင်ခြည်ကိုရုပ်သိမ်းခြင်း, သော့ခတ်ခြင်း, ၎င်းသည်အဆင့်မြင့်တက်ကြွသောဝန်ထုပ်ခံခန်းအာရုံခံကိရိယာများနှင့်မြင့်မားသော dynamic sensor များနှင့်မြင့်မားသော resolution magnetostrict ်ဌာန်းထားသော Magnetostrative Medonactive Mortonactive Sensor များအားနမူနာ၏အင်အားကိုတိုင်းတာရန်အဆင့်မြင့် hydraulic servo drive နည်းပညာကိုအသုံးပြုသည်။ တန်ဖိုးနှင့်ရွှေ့ပြောင်းခံရ။ ဒစ်ဂျစ်တယ်တိုင်းတာခြင်းနှင့်ထိန်းချုပ်မှုစနစ်သည်အင်အား, ပုံပျက်မှုနှင့်နေရာရွှေ့ပြောင်းခြင်း၏ Pid ထိန်းချုပ်မှုကိုထိန်းချုပ်နိုင်ပြီးထိန်းချုပ်မှုတစ်ခုစီကိုချောချောမွေ့မွေ့ပြောင်းနိုင်သည်။ Test Software သည် Windows XP / Win7 တရုတ်ပတ်ဝန်းကျင်တွင်ပါ 0 င်သည်။ စမ်းသပ်ခြင်းလုပ်ငန်းစဉ်ကိုကွန်ပျူတာထိန်းချုပ်မှုသို့အပြည့်အဝပေါင်းစပ်ထားသည်။ စမ်းသပ်စက်သည်သိပ္ပံဆိုင်ရာသုတေသနဆိုင်ရာသုတေသနဆိုင်ရာဌာန, အမျိုးသားကာကွယ်ရေးနှင့်စစ်ရေးလုပ်ငန်းများ, တက္ကသိုလ်များ, စက်ပစ္စည်းထုတ်လုပ်ခြင်း,
အသေးစိတ်အချက်အလက်
| ပုံစံ | pws-25kn | pws-100kn |
| အများဆုံးစမ်းသပ်အင်အားစု | 25kn | 100K |
| စမ်းသပ်အင်အားစု resolution ကုဒ် | 1/180000 | |
| စမ်းသပ်အင်အားစုအရိပ်အရင်း | in ± 0.5% အတွင်း | |
| ရွှေ့ပြောင်းခံရတိုင်းတာခြင်းအကွာအဝေး | 0 ~ 150 (± 75) (MM) | |
| ရွှေ့ပြောင်းခံရတိုင်းတာခြင်းအစိတ်အပိုင်း | 0.001mm | |
| ရွှေ့ပြောင်းခံရတိုင်းတာခြင်းကိုအညွှန်းကိန်း၏ဆွေမျိုးအမှား | in ± 0.5% အတွင်း | |
| ဝယ်ယူအကြိမ်ရေ | 0.01 ~ 100hz | |
| စံစမ်းသပ်ကြိမ်နှုန်း | 0.01-50Hz | |
| waveforms စမ်းသပ် | Sine Wave, တြိဂံလှိုင်း, စတုရန်းလှိုင်း, တစ်ဝက်လှိုင်း, တြိဂံလှိုင်း, တြိဂံလှိုင်း, တြိဂံလှိုင်း, | |
| စမ်းသပ်အာကာသ (ကရိယာမရှိဘဲ) မီလီမီတာ | 1600 (စိတ်ကြိုက်ပြုလုပ်နိုင်သည်) | |
| ပြည်တွင်းထိရောက်သောအကျယ်မီလီမီတာ | 650 (စိတ်ကြိုက်ပြုလုပ်နိုင်သည်) | |
စံဖြစ်သော
1) GB / T 2611-2007 "စမ်းသပ်စက်များအတွက်အထွေထွေနည်းပညာဆိုင်ရာလိုအပ်ချက်များ"
2) GB / T1682525.1-2008 "static uniasial testing machine အပိုင်း 1 ကိုစစ်ဆေးခြင်း - tensile နှင့် (သို့မဟုတ်) compression testing machine 'ကိုတိုင်းတာခြင်းစနစ်၏စစ်ဆေးမှုနှင့်စံကိုက်ညှိခြင်း
3) GB / T 16826-2008 "Electro-hydraulic servo universal testing machine"
4) JB / T 8612-1997 "Electro-hydraulic servo universal testing machine"
5. JB9397-2002 "တင်းမာမှုနှင့်ချုံ့ခြင်းဆိုင်ရာပင်ပန်းနွမ်းနယ်မှုစမ်းသပ်မှုစက်"
6. GB / T 3075-2008 "Metal Axial Axial Axial Axial Failed Type Method"
7. GB / T1524888-2008 "axial acalant amplitude lowcle justication fulci fulci fulci fulci fulci
8. GB / T2114333-2007 "quasi-static static fromicture flacture quothering အတွက်စည်းလုံးသောစမ်းသပ်မှုနည်းလမ်း"
9) HG / T 2067-1991 ရော်ဘာပင်ရော်ဘာပင်ပန်းနွမ်းနယ်မှုစက်နည်းပညာအခြေအနေများ
10) ASTM E466 စံချိန်စံချိန်တင် elaste elastic လေယာဉ်၏ strain frother frother frother tracture
11) ASTM E1820 2001 JIC TEST စံနှုန်းများသည်ကျိုးကြောင်းတင်းကြပ်မှုအားဖြင့်တိုင်းတာသည်
အဓိကအင်္ဂါရပ်များ
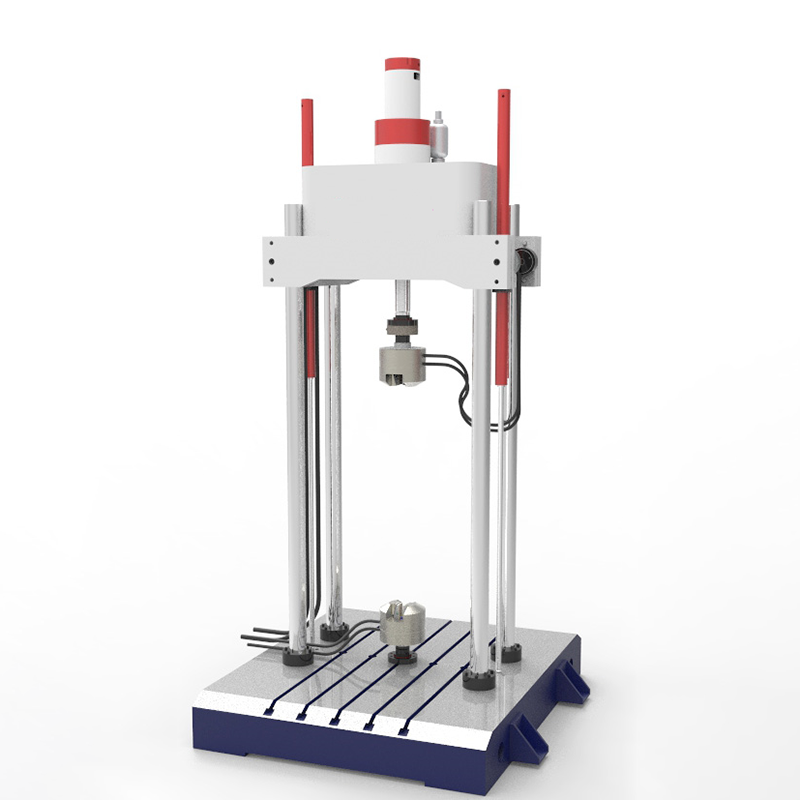
1 host:အိမ်ရှင်သည် 0 င်ရောက်နိုင်သည့် axial linear actuator စည်းဝေးပွဲ, ဟိုက်ဒရောလစ်အထောက်အကူများ,
2 Host Loading frame:
အဓိကစက်၏ loading frame ကိုဖြောင့်မတ်သောရွှေ့ပြောင်းနိုင်သောထုပ်များနှင့်တံခါးပိတ်တင်ထားသောဘောင်တစ်ခုဖွဲ့စည်းရန် throwrights, ရွေ့လျားနေသောထုပ်လေးခုဖြင့်ဖွဲ့စည်းထားသည်။ Compact ဖွဲ့စည်းပုံ, မြင့်မားသောတင်းကျပ်စွာနှင့်အလျင်အမြန်ပြောင်းလဲနေသောတုံ့ပြန်မှု။
2.1 axial bearing စွမ်းရည်: ≥± 100KN;
2.2 ရွှေ့ပြောင်းနိုင်သောရောင်ခြည် - ဟိုက်ဒရောလစ်ရုပ်သိမ်းခြင်း, ဟိုက်ဒရောလစ်သော့ခတ်ခြင်း,
2.3 စမ်းသပ်အာကာသ: 650 × 1600mm
2.4 ဝန်အာရုံခံကိရိယာ: (Qianli)
2.4.1 အာရုံခံကိရိယာသတ်မှတ်ချက်များ: 100kn
2.4.2 အာရုံခံကိရိယာ linearity: ± 0.1%;
2.4.3 အာရုံခံကိရိယာ overload: 150% ။
3 ဟိုက်ဒရောလစ်ဆာဗာ 0 င်မှုတစ်ခုတည်ထောင်သူ actuator:
3.1 actuator စည်းဝေးပွဲ
3.1.1 ဖွဲ့စည်းပုံ - Servuator actuator, servo valve, load sensacements,
3.1.2 အင်္ဂါရပ်များ - ပေါင်းစည်းထားသောအခြေပြု installation သည် load ကွင်းဆက်ကိုအတိုကောက်, စနစ်၏တင်းကျပ်မှုကိုတိုးတက်စေပြီးနှစ် ဦး နှစ်ဖက်တပ်ဖွဲ့၏ခံနိုင်ရည်ရှိသည်။
3.1.3 ဝယ်ယူမှုကြိမ်နှုန်း - 0.01 ~ 100Hz (စမ်းသပ်မှုကြိမ်နှုန်းသည်ယေဘုယျအားဖြင့် 70Hz ထက်မပိုပါ) ။
3.1.4 configuration:
က။ linear actuator: 1
I. ဖွဲ့စည်းပုံ - နှစ်ဆလှံတံနှစ်ဆသရုပ်ဆောင်ခြင်း,
2 ။ အများဆုံးစမ်းသပ်အင်အား: 100 kn;
iii ။ 21MPA;
IV ။ ပစ္စတင်လေဖြတ်: ± 75 မီလီမီတာ; မှတ်စု: ဟိုက်ဒရောလစ်ကြားခံဇုန်သတ်မှတ်ရန်,
ခ။ လျှပ်စစ် - ဟိုက်ဒရောလစ်ဆာဗာအဆို့ရှင်: (တင်သွင်းသောအမှတ်တံဆိပ်)
I. မော်ဒယ်: G761
2 ။ rated စီးဆင်းမှု: 46 l / min 1 အပိုင်းအစ
iii ။ rated ဖိအား: 21mpa
IV ။ အလုပ်လုပ်ဖိအား: 0.5 ~ 31.5 Mpa
ဂ။ တ ဦး တည်း Magnetostrictive ရွှေ့ပြောင်းခံရအာရုံခံ
I. Model: HR စီးရီး
2 ။ တိုင်းတာခြင်းအကွာအဝေး: ± 75mm
iii ။ resolution: 1um
IV ။ non-linearity: <±± 0.01% အပြည့်အဝစကေး>
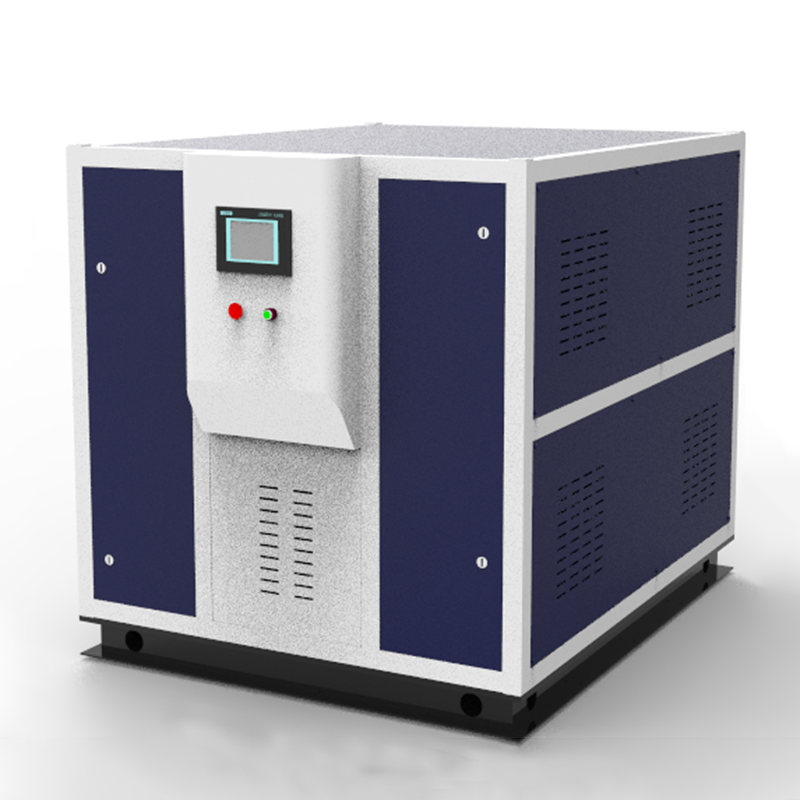
4 ဟိုက်ဒရောလစ်အထောက်အကူများစဉ်ဆက်မပြတ်ဖိအားဆီအရင်းအမြစ်
အဆိုပါ pump station သည် modular ဒီဇိုင်းနှင့်အတူစံသတ်မှတ်ထားသောစုပ်စက်တစ်ခုဖြစ်ပါတယ်။ သီအိုရီအရ၎င်းသည်မည်သည့်စီးဆင်းမှုနှင့်မဆိုစုပ်စက်ကြီးတစ်ခုသို့ကက်စတင်နိုင်သဖြင့်ကောင်းမွန်သောစကေးနှင့်ပြောင်းလွယ်ပြင်လွယ်အသုံးပြုမှုရှိသည်။
L ·စုစုပေါင်းစီးဆင်းမှု 46l / min, ဖိအား 21mpa ။ (စမ်းသပ်လိုအပ်ချက်အရချိန်ညှိ)
ဌစုစုပေါင်းပါဝါမှာ 22KW, 380V, သုံးအဆင့်, 50Hz, AC ။
L ကို Pump Station သည်အဆင့်မြင့်နည်းပညာနှင့်တည်ငြိမ်သောစွမ်းဆောင်ရည်နှင့်အညီဒီဇိုင်းနှင့်ထုတ်လုပ်သည်။ ၎င်းတွင် actuator နှင့်ချိတ်ဆက်ထားသော relay voltage တည်ငြိမ်သော module တစ်ခုတပ်ဆင်ထားသည်။
L ·စုပ်စက်များ, မော်တာများ, အမြင့်နှင့်အနိမ့်အမြင့်ဖိအားများအဆို့ရှင်များ,
L · filtration system သည်သုံးစင်ပေါ် filtration ကိုမွေးစားသည်။ ရေနံပန့်စုတ်ယူခြင်းဆိပ်ကမ်း, 100μ; ရေနံအရင်းအမြစ်ထွက်ပေါက်, filtration တိကျမှန်ကန်မှု3μ; relay ဗို့အား Regulator module, filtration တိကျမှန်ကန်မှု3μ။
L ·ရေနံစုပ်စက်ကိုဂျာမန် Telford Internation Gear Pump မှရွေးချယ်သည်။
L ·ဆီပုပ်စက်ကိုမော်တာယူနစ်သည်တုန်ခါမှုနှင့်ဆူညံသံကိုလျှော့ချရန် (damping pad ကိုရွေးချယ်ခြင်း) တပ်ဆင်ထားသည်။
L ကိုဟိုက်ဒရောလစ်စနစ်ကိုစတင်ရန်နှင့်ရပ်တန့်ရန်မြင့်မားသောဖိအား swardve switch switch switch switch switch switch switch switch switch switch switch switch switch switch switch switch switch sward switch group ကိုသုံးပါ။
L ကိုအပြည့်အဝပါ 0 င်သည့်စံ servo လောင်စာဆီတိုင်ကီတွင်အပြည့်အဝပူးတွဲပါသောလောင်စာဆီတိုင်ပမာဏသည် 260L ထက်မနည်းပါ။ ၎င်းတွင်အပူချိန်တိုင်းတာခြင်း, airtration, ရေနံအဆင့်မျက်နှာပြင်စသည်တို့ပါ 0 င်သည်။
L ·စီးဆင်းမှုနှုန်း: 40L / Min, 21MPA
5 ။ 5 တိကျတဲ့ထည့်သွင်းရန်အတင်းအကျပ်ခိုင်းစေခြင်း (optional)
5.5.1 ဟိုက်ဒရောလစ်အတင်းအဓမ္မညှပ် Chuck Chuck ။ အစွမ်း,
အလုပ်လုပ်သောဖိအားပေးမှု 21MPA အနေဖြင့် Hydraulic Formed Clamping သည်။
ဌ·အလုပ်လုပ်ဖိအားကိုချိန်ညှိနိုင်သည်, ညှိနှိုင်းမှုအကွာအဝေးသည် 1MP-21MPA ဖြစ်သည်။
L ကိုဖွင့်ထားသည့်ဖွဲ့စည်းပုံ,
L ကို Self-locking nut နှင့်အတူ, အဓိကအင်ဂျင်၏အထက်ပိုင်းနှင့်အောက်ပိုင်း actuator ၏ပစ္စတင်အပေါ်ဝန်အာရုံခံကိရိယာကိုချိတ်ဆက်ပါ။
L ပြီလစဉ်နမူနာအတွက်မေးရိုးများ - 2 စုံ, ပြားချပ်ချပ်နမူနာများအတွက် clamping မေးရိုး: 2 အစုံ; (တိုးချဲ့)
5.5.2 compression နှင့် bending tests များအတွက်အေအိုင်ဒီအက်စ်အစုတခု -
L ·အချင်းနှင့်အတူဖိအားပြားများနှင့်အချင်းφ80mm
L · 0 င်ရောက်ခြင်းပင်ပန်းနွမ်းနယ်မှုစမ်းသပ်မှုအတွက် 3 မှတ် -