လျှောက်လွှာလယ်ပြင်
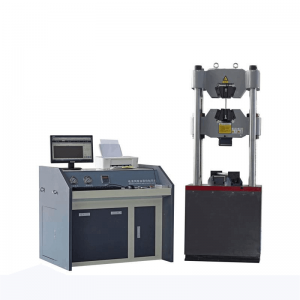
ဝဝါဟိုက်ဒရောလစ်စကြဝ universal ာရေးစက်၏အဓိကစက်သည်ရေနံတွင်းပစ္စည်းများ, သတ္တုမဟုတ်သောပစ္စည်းများ, အစိတ်အပိုင်းများ, အစိတ်အပိုင်းများ, ဖွဲ့စည်းတည်ဆောက်ပုံ, ဖွဲ့စည်းတည်ဆောက်ပုံ, 2. ဒီစမ်းသပ်မှုစက်သည်ပတ် 0 န်းကျင်ဆိုင်ရာကိရိယာများတပ်ဆင်ထားပါကပတ် 0 န်းကျင်အောက်ရှိပစ္စည်းများဆန့်ခြင်း, ချုံ့ခြင်းနှင့်ကွေးခြင်းစမ်းသပ်မှုပြုလုပ်နိုင်သည်။
အဓိကအင်္ဂါရပ်များ
မြင့်သောအရည်အသွေးမြင့်မားသောတိကျစွာ, Cost - ထိရောက်သော
တည်ငြိမ်သောစက်လည်ပတ်မှုကိုကမ်းလှမ်းသော High Rigid frame frame string process နှင့်တိကျသော servo motor transmission အစိတ်အပိုင်းများ
ပလပ်စတစ်, အထည်အလိပ်, သတ္တု, သတ္တု, ဗိသုကာစက်မှုလုပ်ငန်းများအတွက်သင့်တော်သည်။
UTM နှင့် Controller ၏သီးခြားဒီဇိုင်းသည်ပြုပြင်ထိန်းသိမ်းမှုကိုပိုမိုလွယ်ကူစေသည်။
နှင့်စုပ်ယူနိုင်သည့်ဆော့ဝဲလ်သည်ဆန့်ကျင်, ချုံ့ခြင်း,
စံအရသိရသည်
၎င်းသည် National GB / T228.1-2010 "အခန်းအပူချိန်ရှိသတ္တုပစ္စည်းသောစမ်းသပ်မှုနည်းလမ်း" ၏လိုအပ်ချက်များနှင့်တွေ့ဆုံသည်, GB / T7314-2005 "Metal Compression Test Mether" နှင့် ASTM, ASTM ၏အချက်အလက်များလုပ်ဆောင်ခြင်းနှင့်ကိုက်ညီသည် , DIN နှင့်အခြားစံနှုန်းများ။ ၎င်းသည်အသုံးပြုသူများနှင့်ထောက်ပံ့ပေးသည့်စံနှုန်းများနှင့်ကိုက်ညီနိုင်သည်။

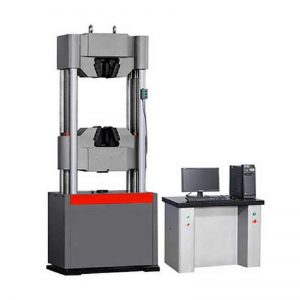
ဂီယာစနစ်
အောက်ပိုင်း Crossbeameameam ၏ရုပ်သိမ်းခြင်းနှင့်လျှော့ချခြင်းကလျှော့ချခြင်း, ကွင်းဆက်ထုတ်လွှင့်ခြင်းယန္တရားနှင့်တင်းတင်းကျပ်ကျပ်ဆက်နွယ်မှုရှိသည့်မော်တော်ဆိုင်ကယ်တစ်စောင်နှင့်တင်းကြပ်စွာချိတ်ဆက်ထားသည့်မော်တော်ဆိုင်ကယ်တစ်ခုဖြစ်စေသည်။
ဟိုက်ဒရောလစ်စနစ်
ရေနံတိုင်ကီတွင်ဟိုက်ဒရောလစ်ရေနံသည်မော်တာကမောင်းနှင်နိုင်မှုစုပ်စက်ကိုမောင်းနှင်ရန်မော်တော်ယာဉ်များကိုမောင်းနှင်ရန်မော်တော်ယာဉ်များ, ရေနံဆလင်ဒါ ကွန်ပျူတာသည် servo valve ၏အဖွင့်နှင့် ဦး တည်ချက်ကိုထိန်းချုပ်ရန် servo valve သို့ထိန်းချုပ်မှု signal ကိုပို့သည်။
| display mode ကို | ကွန်ပျူတာထိန်းချုပ်မှုနှင့်ပြသမှုပြည့် | |||
| ပုံစံ | Wew-300B | WeW-300d | wew-600 ခ | wew-600d |
| ဆောက်လုပ်ပုံ | 2 ကော်လံ | 4 ကော်လံ | 2 ကော်လံ | 4 ကော်လံ |
| 2 screw နှစ်ခု | 2 screw နှစ်ခု | 2 screw နှစ်ခု | 2 screw နှစ်ခု | |
| Max.load စွမ်းအား | 300kn | 300kn | 600nn | 600nn |
| စမ်းသပ်အကွာအဝေး | 2% -100% FS | |||
| နေရပ်စွန့်ခွာတိမ်းရှောင်မှု resolution (MM) | 0.01 | |||
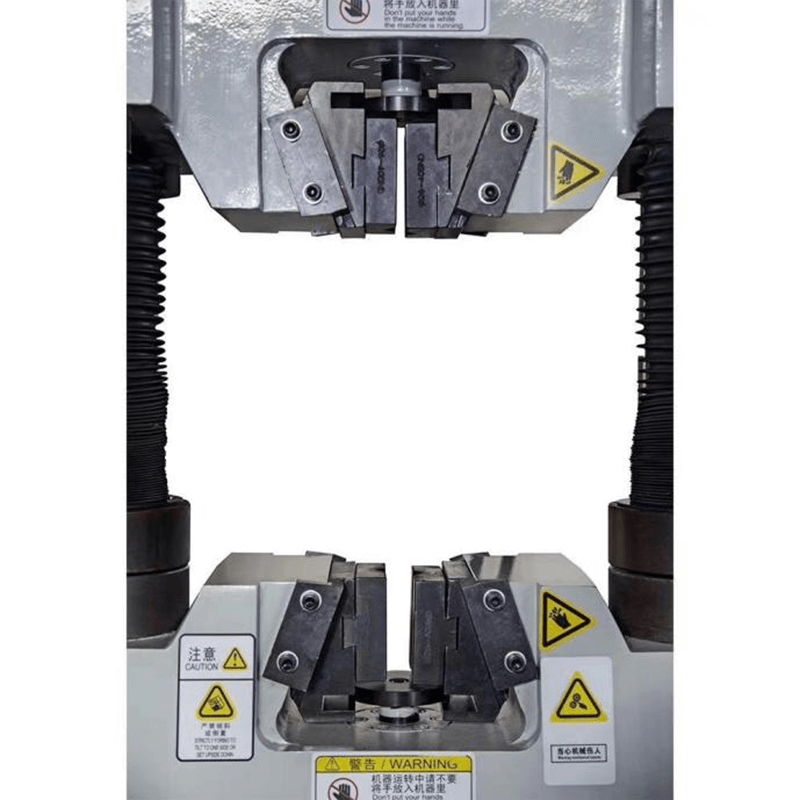
| clamping နည်းလမ်း | လက်စွဲစာအုပ် clamping သို့မဟုတ်ဟိုက်ဒရောလစ်ညှပ် | |||
| ပစ္စတင်လေဖြတ်ခြင်း (စိတ်ကြိုက်) (MM) | 150 | |||
| ဆန့်အာကာသ (MM) | 580 | |||
| Compression Space (MM) | 500 | |||
| ပတ်ပတ်လည်နမူနာ clamping အကွာအဝေး (MM) | φ4-32 | φ6-40 | ||
| ပြားချပ်ချပ်နမူနာ clamping အကွာအဝေး (MM) | 0-30 | 0-40 | ||
| Compression Plate (MM) |
φ160 | |||